産品特點
1.上方警戒區域内的低速、抛錨目标進行探測與報警
2.對距離(lí)海上風(fēng)機(jī)太近的目标進行探測與報警
3.對經過海上風(fēng)電場的所有目标進行記錄并可(kě)回放(fàng)追溯
目标提取 強力探測
系統采用新一代先進的算法,在雷達噪聲大(dà)于信号的強幹擾背景環境下,也能自(zì)動發現并跟蹤低慢(màn)小目标。一般雷達采用TWS(Track while SCAN)目标檢測技術(shù),掃描的同時對目标進行跟蹤。本系統的小目标雷達,采用TBD(Track before Detection),跟蹤前就(jiù)早已對目标進行探測了。其原理(lǐ)是不斷将每圈掃到的上千個“目标”回波都(dōu)存儲起來(lái),通過設立自(zì)适應的噪聲門(mén)限、長時間數據分(fēn)析與比較,去(qù)除海雜波、雨(yǔ)雜波、系統噪聲的幹擾,将達到預定“質量标準”的“目标”篩選爲真實目标,從(cóng)而實現對小目标探測的低遺漏、無重複、低虛報。
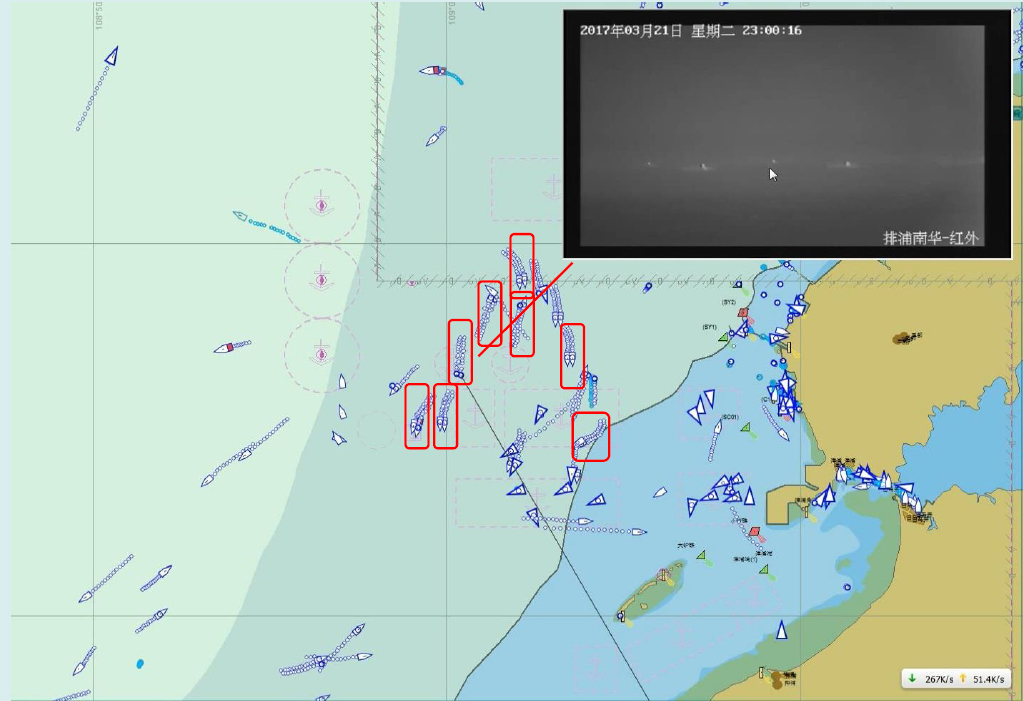

雷達可(kě)識别出雙拖網作(zuò)業船(chuán)、網排等目标 裝在海上升壓站(zhàn)的雷達-光(guāng)電系統
多源融合 動态感知
軟件(jiàn)通過目标位置分(fēn)析、行爲分(fēn)析、特征匹配等手段,将雷達(一部或者多部)、AIS、光(guāng)電三種信号統一在“一張圖”上顯示,用戶可(kě)在圖上“點哪看(kàn)哪”,迅速掌握海握海面動态。
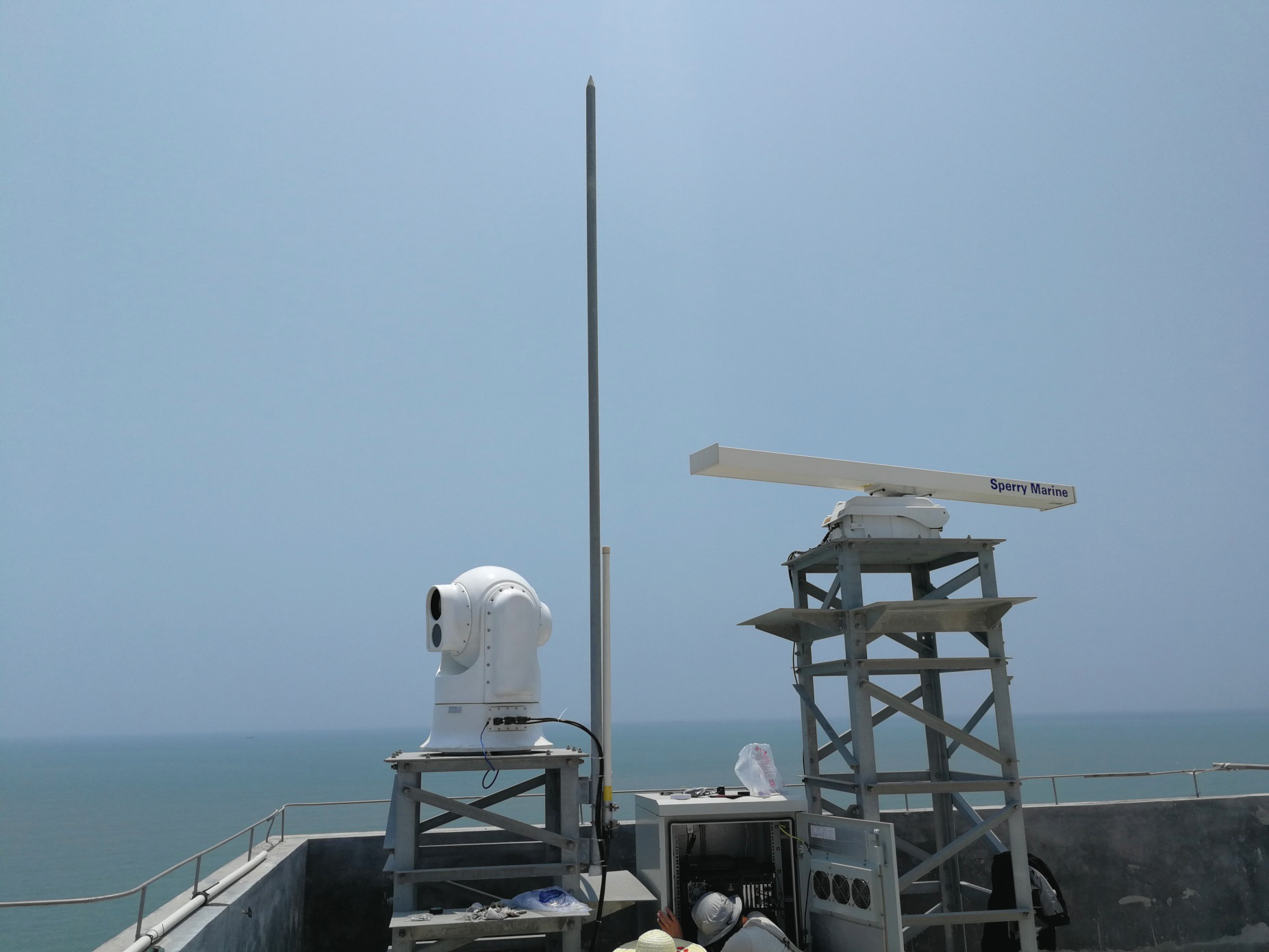
雷達、光(guāng)電、AIS安裝示意圖
自(zì)動識别 安全預警
系統在無需人(rén)員(yuán)操作(zuò)的情況下,具有同時跟蹤大(dà)中小型目标的能力,可(kě)設定“白(bái)名單”、“黑(hēi)名單”,可(kě)設定低速、零速報警區域,跟蹤拍(pāi)攝區域,禁入禁出區域等,可(kě)統計(jì)區域内的目标總數、進出目标數,可(kě)輸出報警信号到其他(tā)設備。日(rì)常應用時,系統自(zì)動處理(lǐ)海量的目标數據據,用戶隻需要關注少數異常目标即可(kě)

進入劃線區域的船(chuán)隻光(guāng)電聯動拍(pāi)攝
回放(fàng)追溯 雁過留痕
系統不間斷采集所有經過風(fēng)電場的目标信息,全程記錄設定時間(1個月或更長)内所有目标的原始數據。一旦發生(shēng)刮擦、撞擊風(fēng)機(jī),拖斷海纜,違規進入風(fēng)電場等事(shì)故,通過回放(fàng)可(kě)對經過船(chuán)隻的行爲、狀态進行标示和分(fēn)析,找到肇事(shì)船(chuán)隻,還(hái)原事(shì)發過程。
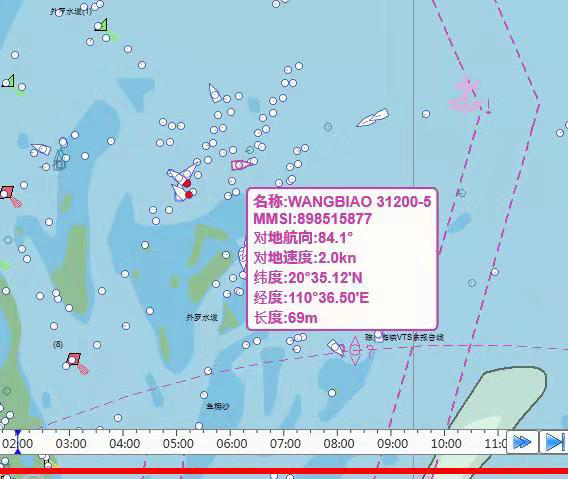
某海上風(fēng)電場數據回放(fàng),淩晨2點經過的船(chuán)隻
光(guāng)電設備 确認目标
備高清長焦白(bái)光(guāng)攝像機(jī)和紅(hóng)外熱(rè)像儀,能在5km以外看(kàn)清大(dà)部分(fēn)船(chuán)隻的船(chuán)名,能在10km以外确定船(chuán)隻的外觀特征。設備外殼采用耐腐蝕的複合材料,球形抗台風(fēng)結構,能長期在海洋環境中使用。

光(guāng)電設備所拍(pāi)攝的抛錨船(chuán)隻